|
Large Image Display:Chrysalis (2007): Switching to Scans
|
|
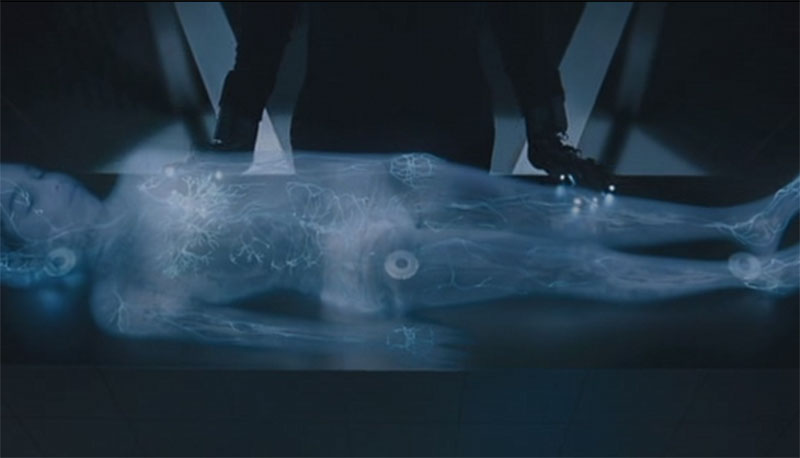
BackgroundChrysalis is a very dark French film. It aired in 2007, (one of three films with the same name to air that year) and is entirely French speaking. An English dub is availalble, but hammy.It is a mix between cyberpunk and film noire, and is a rich breeding ground to visual examples of potentials for VR, along with the social and legal effects of such. ExaminationThis single still taken from this film has been considerably scaled back from the original material.Here, we see Chrysalis' telesurgical system interface laid out in front of the surgeon. The patient, this young child, isn't really there. Instead the slab shows a projection in thin air. It looks a little like a modern heliodisplay system, in that its a projection directly into the air above the table. The slab itself even looks like such a projection, but unlike heliodisplay, as the camera pans, we see it is full three dimensional, with length, breadth and height. Current systems can only do length and height, 2D rather than 3D. However, Chrysalis is attempting to showcase what could be done, rather than what can be done, and a three dimensional system certainly makes much more sense than a two dimensional air display. It does however, visibly make use of the same principles, with translucent imagery reflecting off of dust particles naturally suspended in the air. This is one instance when dust in an operating room is a very good thing. Of course, since the patient is not here, but in a connected room dozens, perhaps thousands of miles away, the presence of such contamination is not a problem.  A modern heliodisplay producing a colour image in mid-air. Like its modern equivalent, the display is interactive, with sensors triangulating the position of any solid object that moves through the display, and allowing it to interact. In this case we see the surgeon is also wearing datagloves with light points at the tips. Again, this makes sense, as the light source is going to be easier to track via multiple cameras, which are obviously the type of sensor used here, than fingers alone would be. Likewise a dataglove is riddled with sensors and haptic bladders – modern ones typically have 14 – that deliver a sense of touch back to the user, as if they are actually pressing on an object. In other words, the dataglove sensors can precisely measure every joint movement of every finger, cameras embedded into the table and around the room can track and triangulate the positions of the hands in real-time relative to the patient, and dataglove haptics will return touch feedback to the surgeon's pressure nerves, based on the pressure the probes at the other end encounter. None of this technology is anything new; this is all technology we currently possess. It is being used in a logical manner for surgery – where the surgeon's every delicate movement matters. LinksMain Article on Chrysalis VR Interfaces: The Heliodisplay Dictionary: Telesurgery Dictionary: Telesurgical Unit
|